자세한 내용은 데이터 유형 레퍼런스를 참조하세요.
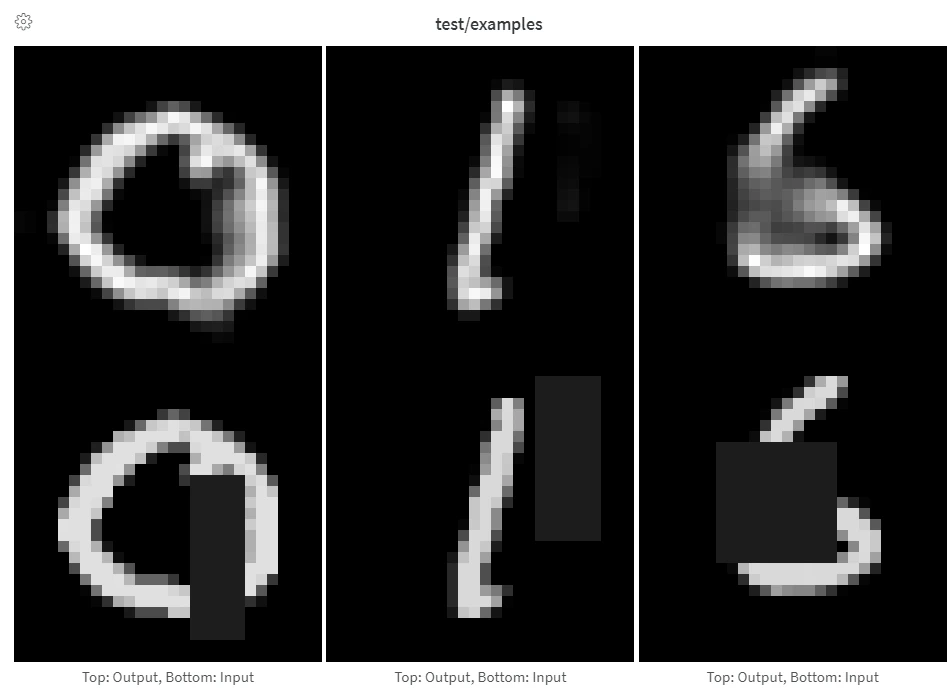
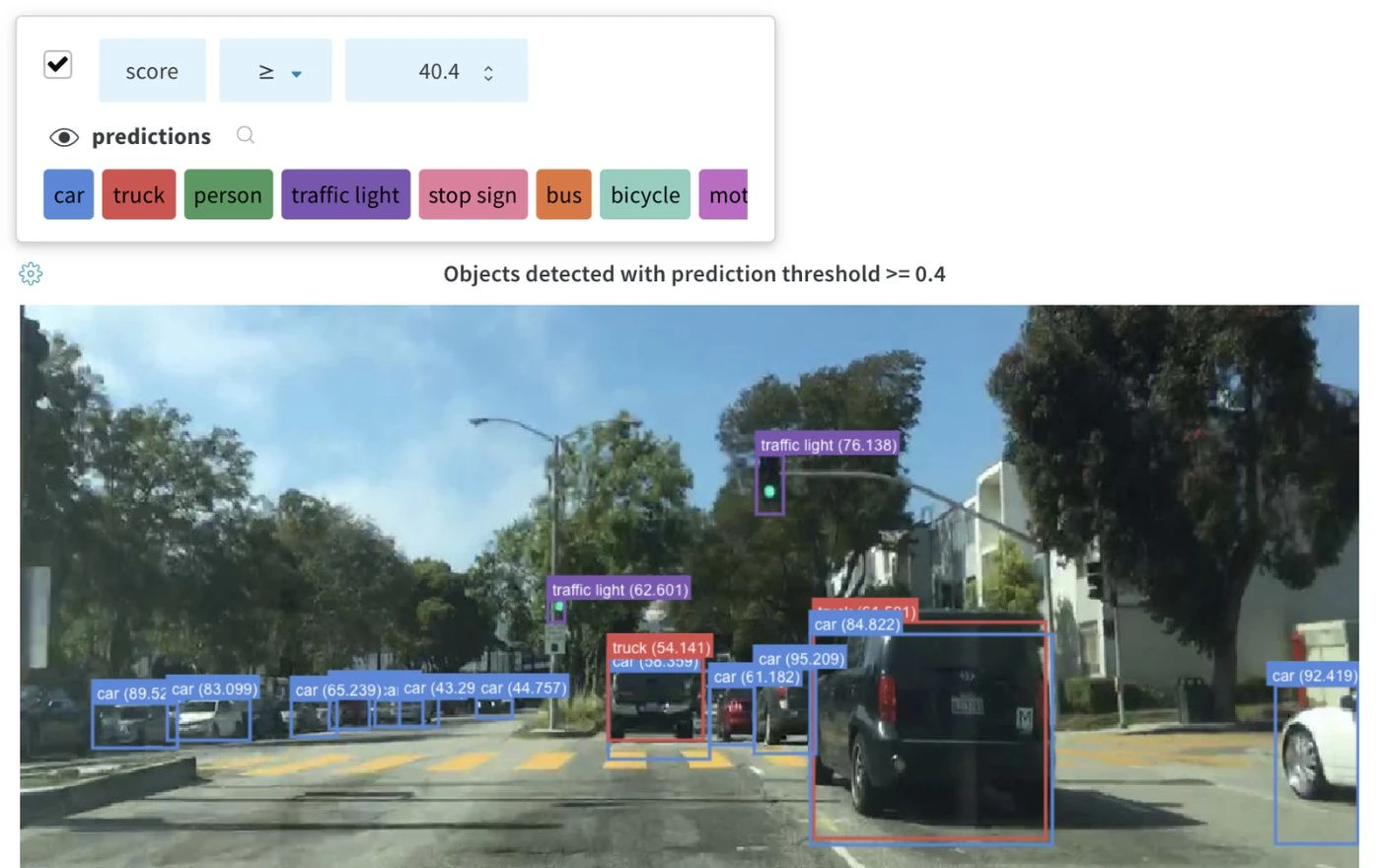
더 자세한 내용은 모델 예측을 시각화하는 데모 리포트를 확인하거나 비디오 워크스루를 시청하세요.
사전 요구 사항
이미지
트레이닝 중 로깅이 병목이 되거나, 결과를 볼 때 이미지 로딩이 병목이 되는 것을 방지하려면 step당 50개 미만의 이미지를 로깅하는 것이 좋습니다.
- 배열을 이미지로 로깅하기
- PIL 이미지 로깅하기
- 파일에서 이미지 로깅하기
이미지 오버레이
- 세그멘테이션 마스크
- 바운딩 박스
시맨틱 세그멘테이션 마스크를 로깅하고 W&B UI에서 불투명도 조정, 시간에 따른 변화 확인 등 다양한 방식으로 상호작용할 수 있습니다.
wandb.Image의 masks 키워드 인수에 다음 키와 값을 포함한 딕셔너리를 전달하세요:- 이미지 마스크를 나타내는 다음 두 키 중 하나:
"mask_data": 각 픽셀의 정수 클래스 레이블을 포함하는 2D NumPy 배열"path": (string) 저장된 이미지 마스크 파일 경로
"class_labels": (선택) 이미지 마스크의 정수 클래스 레이블을 알아보기 쉬운 클래스 이름에 매핑하는 딕셔너리
run.log()의 각 call)에서 정의됩니다.- step마다 동일한 마스크 키에 서로 다른 값이 있으면, 해당 키의 가장 최근 값만 이미지에 적용됩니다.
- step마다 서로 다른 마스크 키가 있으면, 각 키의 모든 값이 표시되지만 현재 보고 있는 step에 정의된 값만 이미지에 적용됩니다. 해당 step에 정의되지 않은 마스크의 표시 여부를 전환해도 이미지는 변경되지 않습니다.
Tables의 이미지 오버레이
- 세그멘테이션 마스크
- 바운딩 박스
wandb.Image 객체를 제공해야 합니다.예시는 아래 코드 스니펫에 나와 있습니다:
히스토그램
- 기본 히스토그램 로깅하기
- 유연한 히스토그램 로깅하기
리스트, 배열, 텐서와 같은 숫자 시퀀스를 첫 번째 인수로 제공하면 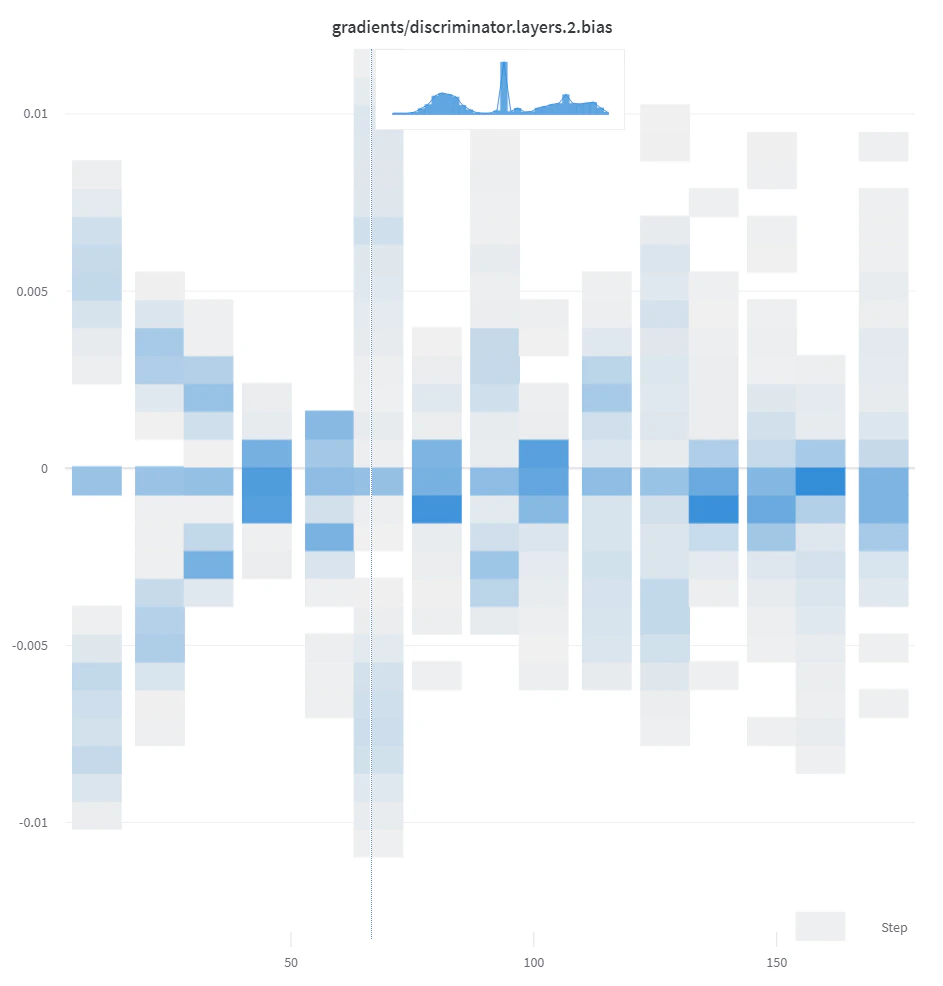
np.histogram()을 호출해 히스토그램을 자동으로 생성합니다. 모든 배열/텐서는 평탄화됩니다. 기본값인 64 bins를 재정의하려면 선택 num_bins 키워드 인수를 사용할 수 있습니다. 지원되는 최대 bins 수는 512입니다.UI에서는 트레이닝 전반에 걸쳐 로깅된 히스토그램을 쉽게 비교할 수 있도록 x축에 트레이닝 step, y축에 메트릭 값, 색상으로 개수를 나타내는 방식으로 히스토그램을 표시합니다. 일회성 히스토그램을 로깅하는 방법에 대한 자세한 내용은 이 패널의 “Summary의 히스토그램” 탭을 참조하세요.3D 시각화
W&B UI는 데이터를 300,000포인트까지만 표시합니다.
NumPy 배열 형식
[[x, y, z], ...]nx3[[x, y, z, c], ...]nx4| c는 [1, 14]범위의 범주 값입니다` (세그멘테이션에 유용)[[x, y, z, r, g, b], ...]nx6 | r,g,b는 빨강, 초록, 파랑 색상 채널의[0,255]범위 값입니다.
Python 객체
from_point_cloud 방법에 전달할 수 있습니다.
points는 위에 나온 단순한 포인트 클라우드 렌더러와 동일한 형식으로 렌더링할 포인트의 좌표와 색상을 포함하는 NumPy 배열입니다.boxes는 세 가지 속성을 갖는 Python 딕셔너리의 NumPy 배열입니다:corners- 8개 코너의 목록label- 박스에 렌더링할 라벨을 나타내는 문자열 (선택)color- 박스의 색상을 나타내는 RGB 값score- 바운딩 박스에 표시되는 숫자 값으로, 표시할 바운딩 박스를 필터링하는 데 사용할 수 있습니다(예:score>0.75인 바운딩 박스만 표시). (선택)
type은 렌더링할 장면 유형을 나타내는 문자열입니다. 현재 지원되는 값은lidar/beta뿐입니다.
포인트 클라우드 파일
from_file 방법을 사용할 수 있습니다.
NumPy 배열
from_numpy 방법로 numpy 배열을 직접 사용해 포인트 클라우드를 정의할 수 있습니다.
pdb, pqr, mmcif, mcif, cif, sdf, sd, gro, mol2, 또는 mmtf.
W&B는 SMILES 문자열, rdkit mol 파일, 그리고 rdkit.Chem.rdchem.Mol 객체의 분자 데이터를 로깅하는 것도 지원합니다.
PNG 이미지
wandb.Image는 기본적으로 numpy 배열이나 PILImage 인스턴스를 PNG로 변환합니다.
비디오
wandb.Video 데이터 유형으로 로깅합니다:
분자의 2D 뷰
wandb.Image 데이터 유형과 rdkit을 사용해 분자의 2D 뷰를 로깅할 수 있습니다:
기타 미디어
오디오
audio-file을 참조하세요.
비디오
ffmpeg와 moviepy Python 라이브러리가 필요합니다). 지원되는 형식은 "gif", "mp4", "webm", "ogg"입니다. wandb.Video에 문자열을 전달하면 wandb에 업로드하기 전에 파일이 존재하는지, 그리고 지원되는 형식인지 확인합니다. BytesIO 객체를 전달하면 지정한 형식을 확장자로 사용하는 임시 파일이 생성됩니다.
W&B run 및 프로젝트 페이지의 Media 섹션에서 비디오를 확인할 수 있습니다.
사용에 대한 자세한 내용은 video-file을 참조하세요.
텍스트
wandb.Table을 사용해 테이블에 텍스트를 로깅하면 UI에 표시할 수 있습니다. 기본 열 헤더는 ["Input", "Output", "Expected"]입니다. 원활한 UI 성능을 위해 기본 최대 행 수는 10,000으로 설정되어 있습니다. 하지만 wandb.Table.MAX_ROWS = {DESIRED_MAX}를 사용해 최대값을 명시적으로 재정의할 수 있습니다.
DataFrame 객체를 전달할 수도 있습니다.
string을 참조하세요.
HTML
inject=False를 전달하면 이를 비활성화할 수 있습니다.
html-file을 참조하세요.